
W branży gospodarki odpadami coraz częściej sortuje się odpady przemysłowe i domowe w celu odzyskania i recyklingu użytecznych komponentów. Każdy rodzaj odpadów lub „frakcja” odpadów może mieć inne zastosowanie i wartość. Jeśli odpady nie są sortowane, często trafiają na wysypisko śmieci lub spalanie, które ma niepożądany wpływ na środowisko i gospodarkę. Znane jest sortowanie odpadów domowych i przemysłowych na różne sposoby. Od wielu lat odpady są ręcznie sortowane ręcznie na przenośniku taśmowym. Jednak ręczne sortowanie odpadów może być uciążliwe i niebezpieczne dla pracowników, w zależności od rodzaju sortowanych odpadów przemysłowych lub domowych. Ponadto niektóre zakłady sortowania odpadów, które używają pracowników, wymagają wielu zmian w celu zwiększenia wydajności sortowanych odpadów. https://pl.wikipedia.org/wiki/Segregacja_odpad%C3%B3w
Przedmiotem patentu PL231732B1 Urządzenie do separacji odpadów , Hut Technika Środowiska Sp z o.o. Wojciech Zarzycki, et al., Data patentu : 29.03.2019, jest urządzenie do separacji odpadów komunalnych, służące do oddzielenia frakcji ciężkiej od frakcji lekkiej oraz frakcji 3D od frakcji 2D.
Separatory powietrzne i separatory balistyczne są powszechnie znanymi urządzeniami wykorzystywanymi do sortowania odpadów. Separatory powietrzne, zwane także aerodynamicznymi lub pneumatycznymi, oddzielają frakcję ciężką od frakcji lekkiej na podstawie ciężaru/ciężaru właściwego materiału, a medium rozdzielającym jest strumień powietrza kierowany na odpady. Separatory balistyczne oddzielają frakcję 3D, np. okrągłe butelki, opakowania, od frakcji 2D, tj. materiały płaskie jak folia czy makulatura – na podstawie kształtu materiału. Następuje to dzięki naprzemiennej pracy posuwisto-zwrotnej łopat separatora balistycznego. Typowy separator balistyczny jest zbudowany z pochylonego dna sitowego, składającego się z naprzemiennie poruszających się kilku perforowanych płyt, wyposażonych we wzdłużne i poprzeczne zabieraki. Zmian konfiguracji separatora dokonuje się przez dobór odpowiedniej perforacji płyt dna sitowego, zmianę kąta pochylenia płaszczyzny dna oraz zmianę konfiguracji zabieraków.
Celem wynalazku jest zapewnienie wykonywania za pomocą jednego urządzenia separacji powietrznej i balistycznej, przy oszczędności miejsca na dwa urządzenia, a także oszczędności czasu i kosztów separacji. Dzięki konstrukcji urządzenia osiąga się lepsze parametry czystości separacji frakcji 3D od 2D. Ponadto umieszczenie urządzenia w jednej obudowie, pozwala na realizację procesu separacji bez konieczności budowania długiej linii technologicznej w postaci modułów, a także zmniejsza stopień zapylenia otoczenia w trakcie procesu separacji. W opisie tym: – frakcja lekka – oznacza odpad o ciężarze właściwym do 230 kg/m3, do kategorii tej należą np. tworzywa sztuczne takie jak butelki po napojach, butelki po chemii gospodarczej, folie, makulatura – ale nie książki; – frakcja ciężka – oznacza odpad o ciężarze właściwym powyżej 230 kg/m3 , do kategorii tej należą np. gruz budowlany, metale – ale nie zgniecione puszki, które mogą być separowane jako frakcja lekka.

Wynalazek został przedstawiony w przykładach wykonania, na rysunku, na którym Fig.1a przedstawia urządzenie do separacji odpadów w rzucie bocznym z wyrwaniem z uwidocznieniem ukrytych elementów, Fig.1b przedstawia urządzenie do separacji odpadów w widoku z boku, Fig.2 przedstawia schemat przepływu powietrza oraz strumienia materiałów w urządzeniu do separacji odpadów przedstawionym na Fig.1, Fig.3a, przedstawia urządzenie do separacji odpadów z dodatkowym wentylatorem i instalacją grzewczą, w rzucie bocznym z wyrwaniem z uwidocznieniem ukrytych elementów, Fig.3b przedstawia urządzenie do separacji odpadów z dodatkowym wentylatorem i instalacją grzewczą w widoku z boku, Fig.4 przedstawia schemat przepływu powietrza oraz strumienia materiałów w urządzeniu do separacji odpadów przedstawionym na Fig.3a i Fig.3b.
Aplikacja patentowa WO2019207200A1 WASTE SORTING GANTRY ROBOTM, ZENROBOTICS, Borkowski Maciej zastrzega robot portalowy do sortowania odpadów zawierający ramę portalową, manipulator do interakcji z jednym lub większą liczbą obiektów odpadowych przeznaczonych do sortowania w obszarze roboczym, w którym manipulator jest ruchomo zamontowany na ramie portalowej, a manipulator jest ruchomy w obszarze roboczym. Przenośnik służy do przemieszczania jednego lub więcej odpadów w obszarze roboczym, a co najmniej jeden otwór rynnowy umieszczony częściowo w obszarze roboczym jest przewidziane do umieszczania zbieranych przedmiotów. Obszar roboczy ma pierwszą oś w kierunku przenośnika i drugą oś w kierunku prostopadłym do kierunku przenośnika, przy czym stosunek wielkości obszaru roboczego w pierwszej osi do wielkości obszaru roboczego w drugiej osi jest mniejsza niż 0,5. 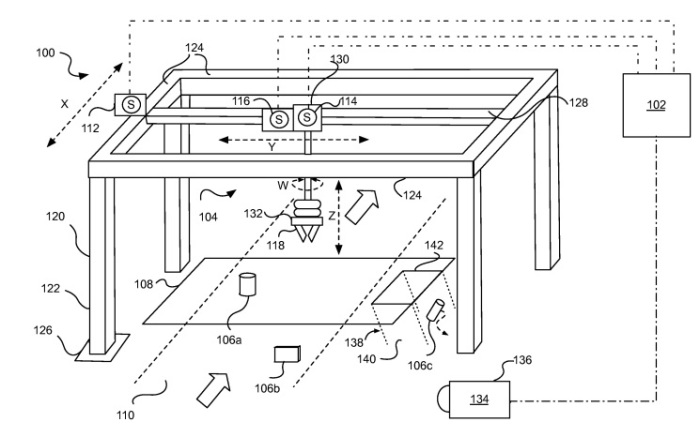
Jednym ze sposobów poprawy bezpieczeństwa i wydajności sortowania odpadów jest zautomatyzowanie jednego lub większej liczby aspektów sortowania odpadów. Automatyzacja może obejmować kontroler wysyłający instrukcje sterowania i ruchu do manipulatora w celu interakcji z obiektami fizycznymi. Kombinacja sterownika wysyłającego instrukcje sterujące do manipulatora może być również określana jako „robot”. Fig.1,2 przedstawia schematyczny widok perspektywiczny robota bramowego do sortowania odpadów; Fig.3 pokazuje schematyczny widok z góry obszaru roboczego robota bramowego do sortowania odpadów; Fig.4 pokazuje schematyczny widok w przekroju robota bramowego do sortowania odpadów; Fig.5 pokazuje przekrój obszaru roboczego; Fig.6 pokazuje zestaw robotów bramowych do sortowania odpadów rozmieszczonych szeregowo wzdłuż taśmy transmisyjnej odpadów.
Schematyczny widok perspektywiczny bramowego robota sortującego odpady 100, przedstawia Fig.1. Robot 100 do sortowania odpadów można zakwalifikować do robota typu SCARA, „Selective Compliance Assembly Robotic Arm” – co oznacza ramię robota do montażu selektywnego. Główną cechą tego typu robota jest to, że może poruszać się w obrębie współrzędnej XYZ. Zasadniczo roboty SCARA wykonują ostatni akt w procesie montażu, gdzie ostatnim krokiem w tym procesie jest pojedynczy ruch pionowy. Z tego powodu roboty SCARA są w większości uznawane za „montaż pionowy”. Te robot jest bardzo wydajny jako manipulator przemysłowy. Wykazuje dużą prędkość, wysoką elastyczność, wysoką sztywność. Może wykonywać dowolne selektywne zadania z większą dokładnością. Robot 100 do sortowania odpadów jest czteroosiowym robotem SCARA 100, który składa się z wewnętrznego ramienia łączącego, które obraca się wokół osi Z. Wewnętrzne ramię łączące jest połączone z zewnętrznym ramieniem łączącym, które obraca się wokół stawu łokciowego Z. Złącze łokciowe Z jest połączone z osią nadgarstka, która porusza się w górę i w dół, a także obraca się wokół osi Z. Robot bramowy do sortowania odpadów zawiera sterownik 102 do wysyłania instrukcji sterowania i przemieszczania do manipulatora 104 w celu interakcji z obiektami fizycznymi 106a, 106b, 106c. Sterownik wysyłający instrukcje sterujące do manipulatora może być również określana jako „robot”. Sterownik 102 znajduje się z dala od manipulatora 104 i jest umieszczony w szafce (nie pokazano). W innych przykładach wykonania sterownik 102 może być zintegrowany z manipulatorem i/lub ramą bramową 120.
Patent EP2486986T3 Urządzenie rozdzielcze z talerzami rozprowadzającymi, Westeria Fordertechnik GmbH, Bernhard Westbrock, Data patentu: 31.03.2014, dotyczy urządzenia rozdzielczego, które jest zastosowane w procesie rozdziału odpadów komunalnych za pomocą obrotowych talerzy.
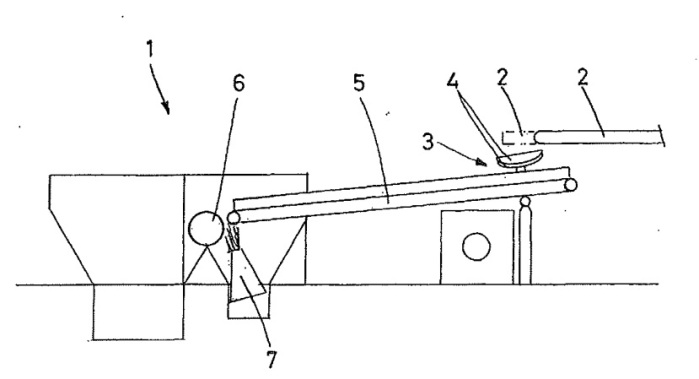
Przykłady wykonania separatora powietrznego, który jest wyposażony w przedstawione urządzenie rozdzielcze, są poniżej bliżej objaśnione na podstawie widoków czysto schematycznych. Fig.1 widok z boku na separator odpadów, Fig.2 widok z góry na separator powietrzny z Fig.1, Fig.3 schematyczny widok z boku na drugi przykład wykonania , z elementem odbijający, Fig.4 i 5 dwa kolejne przykłady wykonania, w widoku z boku, Fig.6 widok z góry na przykład wykonania z Fig.3, a Fig.7 widok zasadniczy torów lotu udziałów mieszanki odpadów w przykładzie wykonania z Fig. 6.
Innymi słowy, wynalazek proponuje urządzenie rozdzielcze, w którym rozdzielanie odpadów następuje za pomocą dwóch talerzy obrotowych. Talerze obrotowe są każdorazowo napędzane obrotowo i tym samym odwirowują odpady, docierające na nie, częściowo w kierunku do przodu, lecz częściowo także z boku na zewnątrz, tak że odpady za pomocą tych talerzy obrotowych są rozdzielane na większej szerokości. Dwa talerze obrotowe są napędzane przeciwbieżnie, tak że uzyskuje się rozdzielenie na obie strony na zewnątrz, a tym samym umożliwione jest rozdzielenie odpadów z pierwszej szerokości na drugą, dużo większą szerokość. Talerze obrotowe są ukształtowane w sposób wklęsły w kształcie niecki, w celu uzyskania optymalnych wyników rozdzielania. Te dwa talerze obrotowe s umieszczone na różnej wysokości oraz w taki sposób, że częściowo zachodzą na siebie. Dzięki zachodzeniu na siebie zapewnione jest to, że wszystkie odpady opadają z pierwszego organu przenoszącego na urządzenie rozdzielcze, a więc na obydwa talerze obrotowe, tak że zapewnione jest niezawodne przyjęcie strumienia materiału, spadającego z pierwszego organu przenoszącego. Ten układ jest korzystny, w porównaniu do przykładowo układu tylko punktowo stykających się obu talerzy obrotowych, który wówczas pozostawia wolnym stosunkowo duże kliny, tak że nie można by wykluczyć, że do tego klina mogłyby spadać odpady, nie będąc uchwyconymi przez talerze obrotowe. W przypadku instalacji do sortowania odpadów, w której stosowane jest odpowiadające propozycji urządzenie rozdzielcze, do pierwszego organu przenoszącego może przylegać zsuwnia, która przenosi odpady na talerze obrotowe. Gdy pierwszy organ przenoszący jest ukształtowany przykładowo jako taśma przenośnikowa, która na swoim końcu podlega zmianie kierunku wokół krążka zwrotnego, wówczas przez przedział górny taśmy przenośnikowej powstałaby wysokość spadania odpadów na talerze obrotowe, na którą ma wpływ średnica krążka zwrotnego. W porównaniu do tego, przez zsuwnię, przylegającą do pierwszego organu przenoszącego, może być utworzona prowadnica odpadów, która sięga tuż nad talerze obrotowe, tak że zmniejszona jest wysokość spadania i uzyskuje się możliwie precyzyjne przenoszenie strumienia odpadów.
Wnioski.
Istotą pierwszego wynalazku w zakresie separacji odpadów jest połączenie dwóch urządzeń, separatora powietrznego i balistycznego w nowy zestaw urządzeń do separacji odpadów. O ile działanie separatora powietrznego jest proste w swojej istocie to separator balistyczny jest skomplikowanym urządzeniem mechanicznym, które wymaga objaśnienia w postaci dokumentacji przykładowej konstrukcji: http://www.ikbsystem.pl/upload/arval/Separator_BALISTYCZNY.pdf. Z kolei drugie rozwiązanie Pana Borkowskiego Macieja przedstawia robot portalowy do sortowania odpadów zawierający ramę portalową, manipulator do interakcji z jednym lub większą liczbą obiektów odpadowych przeznaczonych do sortowania w obszarze roboczym, w którym manipulator jest ruchomo zamontowany na ramie portalowej, a manipulator jest ruchomy w obszarze roboczym. Przenośnik służy do przemieszczania jednego lub więcej odpadów w obszarze roboczym, a co najmniej jeden otwór rynnowy umieszczony częściowo w obszarze roboczym jest przewidziane do umieszczania zbieranych przedmiotów. Tu również można sięgnąć do literatury: ZenRobotics Recycler – Robotic Sorting using Machine Learning dostępnej w Internecie https://users.ics.aalto.fi/praiko/papers/SBS14.pdf. Ostatni patent znanej firmy Westeria® Fördertechnik GmbH zastrzega zastosowanie w charakterze urządzenie rozdzielającego przed separatorem powietrznym dwóch wirujących talerzy obrotowych, które są każdorazowo napędzane obrotowo i tym samym odwirowują odpady, docierające na nie, częściowo w kierunku do przodu, lecz częściowo także z boku na zewnątrz, tak że odpady za pomocą tych talerzy obrotowych są rozdzielane na większej szerokości. Dwa talerze obrotowe są napędzane przeciwbieżnie, tak że uzyskuje się rozdzielenie na obie strony na zewnątrz, a tym samym umożliwione jest rozdzielenie odpadów z pierwszej szerokości na drugą, dużo większą szerokość. Ponieważ nie jestem wybitnym znawca tematu segregacji odpadów komunalnych odsyłam do materiałów źródłowych zamieszczonych na stronie producenta: https://westeria.de/index.php?lang=pl
Na zakończenie polecam materiał filmowy ilustrujący działanie Recycler ZenRobotics nowej generacji – zrobotyzowana stacja sortująca https://www.youtube.com/watch?v=X_1sOPqM_VA
Uwaga. Korzystając z mądrych rad, życzliwych fachowców, artykuł występuje w dwóch wersjach , w wersji skróconej i pełnej. Skrót sygnalizuje temat zestawu przedstawionych patentów, podczas gdy wersja pełna artykułu zawiera treść zamieszczonych patentów z myślą o dociekliwych czytelnikach. Wersja pełna ma formę PDF dostępną na końcu artykułu w pierwszej wersji. Pełna wersja w załaczniku: WASTE SORTING GANTRY ROBOT_total
