
Tym razem wspomnienia z wojskowej służby czynnej zaowocowały tematem przygotowania wyżywienia nie tylko w wojsku. Moje spojrzenie na wojsko jest ogólnie pozytywne, ale z perspektywy czasu uległo zatarciu w pamięci. Wstyd się przyznać ale znaczącą role w życiu żołnierza odgrywała kuchnia, a konkretnie micha bo tak w żargonie nazywały się posiłki. Najważniejsza osoba na kompanii był kucharz, który nie brał udziału w zajęciach wojskowych, nawet w paradnych musztrach, bo do jego obowiązków należało gotowanie i wydawanie posiłków. Wstawał około 5 rano i uruchamiał kuchnie z oddelegowana parą żołnierzy, która kroiła chleb, obierała ziemniaki, myła naczynia, wtedy jeszcze aluminiowe i sprzątała stołówkę po posiłkach. Kto miał dobre układy z kucharzem mógł liczyć na częste wizyty na kuchni w charakterze pomocnika, co owocowało dobrą michą i zwolnieniem z zajęć wojskowych. Dzisiaj w erze komputerów przygotowanie michy dalej jest ważne, stąd krótki przegląd patentowy po robotach kuchennych, które miałem okazje widzieć w znajomej rodzinie.
PL/EP2220981 Robot kuchenny napędzany za pomocą silnika elektrycznego, Vorwerk & Co. Interholding GmbH, Wuppertal, HANS-PETER ARNOLD, Kierspe et al., Data patentu: 26.12.2018. Wynalazek dotyczy robota kuchennego z silnikiem elektrycznym, z misą do mieszania i znajdującym się w niej mieszadłem mającym wałek odbiorczy, który to wałek podczas wkładania do misy sprzęga się z wałkiem napędowym znajdującym się w uchwycie misy, a sprzężenie wałków powstaje wskutek nieokrągłego kształtu przekrojów odpowiednich odcinków wałka napędowego i wałka odbiorczego.
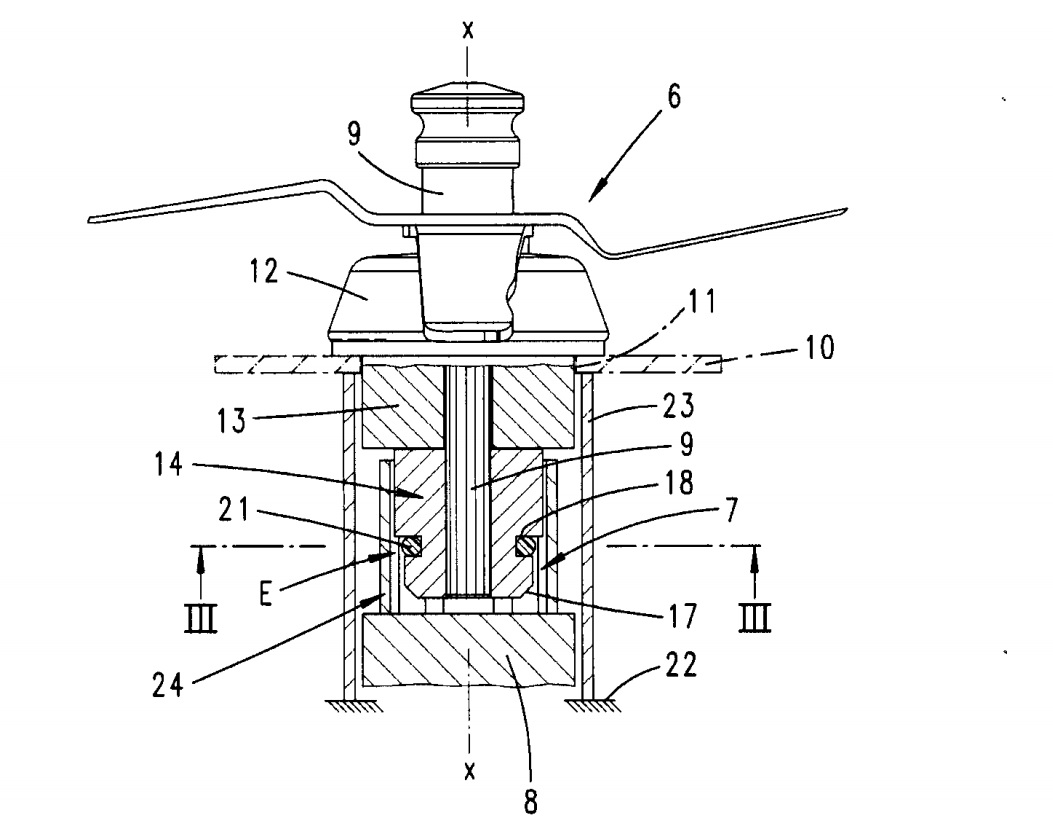 fig. 1 – widok robota kuchennego według wynalazku, z misą oraz znajdującym się w niej napędzanym mieszadłem;
fig. 1 – widok robota kuchennego według wynalazku, z misą oraz znajdującym się w niej napędzanym mieszadłem;
fig. 2 – przekrój wg linii X – X z fig. 1; fig. 3 – przekrój wg linii III – III z fig. 2 przez obszar złącza wałka napędowego robota i wałka odbiorczego misy, dla stanu z obciążeniem; fig. 4 – powiększenie wycinka sprzężenia z fig. 3;
fig. 5 – widok według fig. 4, dotyczący sytuacji przy obciążeniu większym niż według fig. 4, fig. 6 — przekrój wg linii VI – VI z fig. 5;
fig. 7 – jeszcze jeden widok według tej figury, ale przy obciążeniu sprzężenia większym niż na fig. 5; fig. 8 – przekrój wg linii VIII – VIII z fig.7;
fig.9 – mieszadło z połączonym z nim wałkiem odbiorczym jako perspektywiczny widok szczegółowy; fig.10 – rzut poziomy elementu amortyzującego wałka odbiorczego mieszadła; fig.11 – powiększenie obszaru XI z fig.9; gdzie na wale odbiorczym mieszadła jest umieszczone element amortyzujący; fig. 12 – przekrój wg linii XII – XII z fig. 11.
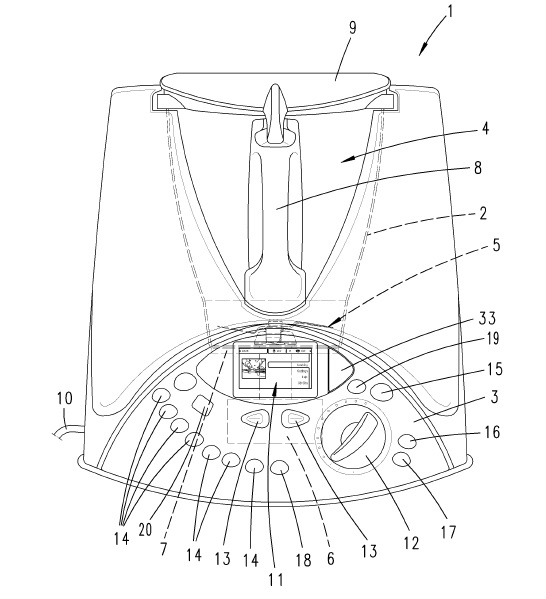
Przedstawiony robot kuchenny 1 z obudową 2, z panelem sterowania 3, który ma nastawnik prędkości obrotowej, a ponadto ewentualnie czujnik termiczny oraz wyświetlacze. Ponadto obudowa 2 ma uchwyt 4 na misę 5, która może być wyjmowana i ewentualnie ogrzewana. Misa ma mieszadło 6 w kształcie mechanizmu nożowego, który jest połączony przez złącze 7 przy zamocowanej w uchwycie 4 misie 5 z silnikiem elektrycznym regulowanym za pomocą nastawnika prędkości obrotowej i umieszczonym w obudowie 2 robota kuchennego. Dno 10 misy 5 jest płaskie i równe; w dnie 10 można umieścić zintegrowany oporowy element grzejny, przykładowo w formie ogrzewania grubowarstwowego. Oś X mieszadła skierowana prostopadle do dna 10 misy przechodzi przez środek dna 10. Unieruchomienie mieszadła 6 przy dnie 10 misy następuje poprzez zamocowanie. Jak widać na na fig. 2, mieszadło 6 ma wałek odbiorczy 9 przechodzący przez dno 10 misy. Wałek ten jest połączony z narzędziami, tutaj nożami, mieszadła 6, które obracają się wraz z nim. Wałek odbiorczy 9 biegnie najpierw w obszarze obudowy mocującej 12, która przechodzi przed dno 10 misy w obszarze odpowiedniego okrągłego otworu 11. Obudowa służy również do zaciskowego zamocowania całego mieszadła 6 do dna 10 misy. Skierowany w dół odcinek obudowy 12, który wystaje do dołu, czyli na stronę dna 10 odwróconą od mieszadła 6, ma na przekroju kołowy element pierścieniowy 13. Odcinek wałka odbiorczego 9 wystający dalej poza element pierścieniowy 13 ma zabierak sprzęgający 14, który razem z nim się obraca. Może być on również wykonany jako jeden element razem z wałkiem odbiorczym 9.
Przedstawione na fig.3 i 4 ustawienie elementu amortyzującego 21 odpowiada stanowi spoczynkowemu, to znaczy przy sprzężeniu 7 bez napędu obrotowego. Punktowe przyleganie (punkt K na fig. 4) elementu amortyzującego 21 umożliwia również przenoszenie ruchu obrotowego z elementu sprzęgającego 24 na zabierak sprzęgający 14 przy mniejszych obciążeniach, na przykład obciążeniu przez mieszadło 6. Po przekroczeniu wartości granicznej obciążenia i osiągnięciu średniego obciążenia działającego na sprzężenie 7 uzyskiwany jest kontakt pomiędzy elementami sprzężenia (zabierak sprzęgające 14 i element sprzęgający 24) dzięki profilowemu kształtowi elementu amortyzującego 21 (patrz punkty K na fig. 5). Drugi stopień urządzenia amortyzującego E jest osiągany przy dużych obciążeniach, przy których z niewielkim ściśnięciem przekroju elementu amortyzującego według fig. 8 powierzchnie końcówek 15 zabieraka i obszary zamocowania 26 końcówek stykają się bezpośrednio (patrz punkt K na fig. 7). Element amortyzujący 21 w kształcie elastycznego pierścienia jest włożony do specjalnie ukształtowanego rowka 18 tak, że zachowana jest swoboda ruchu w formie naprężonej cięciwy. Specjalnie ukształtowany rowek 18 udostępnia różne wolne przestrzenie na profil amortyzujący w zależności od kąta obrotu elementów sprzęgających (zabierak sprzęgający 14 i element sprzęgający 24). Wolne przestrzenie F są wykonane tak, że w pierwszym stanie niskiego obciążenia występuje kontrakt z elementem sprzęgającym przez otwartą część elementu amortyzującego 21. Siła jest więc przenoszona tylko przez cięciwę, ale nie przez docisk pierścieniowego elementu amortyzującego 21. Swobodne przestrzenie F są wykonane tak. że w drugim stanie średniego obciążenia występuje kontakt z elementem sprzęgającym poprzez profilowy kształt elementu amortyzującego 21. Poza tym swobodne przestrzenie F są wykonane tak, że w trzecim stanie najwyższego obciążenia kontakt z elementem sprzęgającym jest przenoszony bezpośrednio przez promieniowe, twarde zazębienie sprzęgające pomiędzy końcówkami 15 zabieraka a obszarami zamocowania 26 końcówek. Na skutek zróżnicowanej zasady działania urządzenia amortyzującego E, następuje samoistne dostosowanie twardości amortyzacji do aktualnego stanu obciążenia.
PLEP2925200 Urządzenie kuchenne, Vorwerk & Co. Interholding GmbH, Wuppertal, HENDRIK KOETZ, Wetter, Data patent: 08.05.2019.
Przedmiotem wynalazku jest elektryczne urządzenie kuchenne („maszyna kuchenna”), które realizuje przetwarzanie środków spożywczych, a w przypadku urządzeń z ogrzewaniem i mieszaniem umożliwia także przygotowywanie potraw. W praktycznym wykonaniu moc grzewcza działająca na naczynie z mieszaniem, czy też na zawartość naczynia z mieszaniem, może być regulowana przez użytkownika, przy czym możliwość ta rozciąga się także na kierunek i szybkość obrotową mieszadła w naczyniu do mieszania, a niekiedy także i na czas działania układu grzewczego i/albo mieszadła. Fig.1 przedstawia widok urządzenia kuchennego omawianego rodzaju, z naczyniem do mieszania, wprowadzonym do zamocowania, przełącznikami mechanicznymi do nastawiania wielkości zadanych oraz z wyświetlaczem/ ekranem; Fig.2 schemat przedstawiający oprogramowanie identyfikujące i banki pamięci do sterowania urządzenia kuchennego 1; Fig.3 blokowy schemat przedstawiający przykład obsługi urządzenia kuchennego.
Elektryczne urządzenie kuchenne (1), z naczyniem do mieszania (4) i mieszadłem (5) w naczyniu do mieszania (4), przy czym urządzenie kuchenne (1) zawiera przetwornik elektro-akustyczny (19) oraz oprogramowanie rozpoznawania mowy, przy czym procedura robocza urządzenia kuchennego (1) może być przeprowadzona w zależności od rozpoznania mowy. Oznacza to, że przewidziany jest system optyczny w postaci kamery elektronicznej z elektroniką rozpoznawania i analizy obrazu i mowy, umożliwiający sprawdzenie, czy osoba znajduje się bezpośrednio przed urządzeniem kuchennym i jest zwrócona w jego stronę, przy czym aktywacja systemu rozpoznawania mowy (E) następuje z chwilą włączenia urządzenia kuchennego (1).. Urządzenie kuchenne z system rozpoznawania mowy (E) uruchamia lub wyłącza realizację procesu roboczego tylko po odebraniu słowa sygnalnego, a ogrzewanie naczynia do mieszania (4) albo działanie mieszadła (5) mogą być realizowane jedynie po nastawieniu liczby obrotów (C1), temperatury (C2) i czasu (C3), lub po akceptacji odpowiedniej propozycji urządzenia kuchennego (1).
Urządzenie kuchenne z system optyczny jest ukierunkowany na prowadzenie rozpoznania w oparciu o czytanie z warg, przy czym system optyczny jest przystosowany do dostrajania z systemem rozpoznawania mowy w celu zwiększenia skuteczności rozpoznawania. Dezaktywacja systemu rozpoznawania mowy (E) następuje z chwilą wyłączenia urządzenia kuchennego (1).
PLEP3250098 Naczynie mieszające dla urządzenia kuchennego, Vorwerk & Co. Interholding GmbH, Wuppertal, FELIX THIES et al., Data patentu: 04.03.2020. Przedmiotem wynalazku jest naczynie mieszające robota kuchennego, wyposażone jest w element czyszczący, który oprócz obrotu wokół osi obrotu mieszadła obraca się wokół osi obrotu, umieszczonej równolegle do osi obrotu. Oprócz ruchu obrotowego wokół osi obrotu mieszadła element czyszczący może wykonać obrót wokół osi obrotu równoległej do osi obrotu mieszadła, przy czym dochodzi tu do nałożenia dwóch ruchów obrotowych, które zwiększa korzystnie intensywność czyszczenia i homogeniczność urządzenia czyszczącego. Zwłaszcza że element czyszczący może się obracać wewnątrz opisanego wcześniej odcinka częściowego okręgu, co sprawia, że działanie czyszczące zostaje wzmocnione. W szczególności można przewidzieć, że każde ramię czyszczące wieloramiennego urządzenia czyszczącego może obracać się niezależnie od innych ramion czyszczących, co sprawia, że co sprawia, że występuje wiele środków obrotu.

Fig. 1 urządzenie kuchenne z naczyniem mieszającym w widoku w przekroju; Fig. 2 widok z góry z perspektywy na naczynie mieszające; Fig. 3 naczynie mieszające z urządzeniem czyszczącym według pierwszej postaci wykonania w widoku ; Fig. 4 naczynie mieszające według Fig. 3 w widoku z góry z perspektywy; Fig. 5 naczynie mieszające z urządzeniem czyszczącym według drugiej postaci wykonania w widoku z góry z perspektywy; Fig.6 (a-c) różne postaci wykonania elementów łączących do podłączenia urządzenia czyszczącego z mieszadłem; Fig. 7 naczynie mieszające z urządzeniem czyszczącym według trzeciej postaci wykonania w widoku w przekroju oraz; Fig. 8 dno naczynia mieszającego z kombinacją urządzenia czyszczącego i urządzenia grzewczego w przekroju.
Napędzane elektromotorycznie urządzenie kuchenne 2, Fig.1, które tu wykonane jest na przykład w postaci miksera kuchennego, posiada sadzono naczynie mieszające 3, które zawiera ścianę 15 naczynia ze ścianą wewnętrzną 4, ograniczającą przestrzeń wewnętrzną 16 naczynia mieszającego 3, wraz z dnem 20 naczynia. Wewnątrz naczynia mieszającego 3 umieszczono mieszadło 5, tu w postaci zestawu 6 noży. Mieszadło 5 jest umieszczone na wale obrotowym (nie pokazano), zawierającym oś obrotu 12, który połączony jest na końcu za pomocą zabieraka sprzęgłowego 18, Fig. 3, z napędem obrotowym urządzenia kuchennego 2. Zespół 6 noży zawiera tu na przykład dwa noże 7, które krzyżują się wzajemnie w obszarze osi obrotu 12 i są przestawione o kąt 90° względem siebie. Noże 7 zawierają w każdym przypadku dwa odcinki końcowe w kształcie sierpa, położone naprzeciwko i przebiegające przeciwnie, które od wklęsłej strony zawierają ostrza noży. Widok z góry na naczynie mieszające 3,, które na ścianie wewnętrznej 4 naczynia mieszającego 3, w szczególności na dnie 20 naczynia, po przyrządzeniu potraw zawiera osady 22, przedstawia Fig.2 . Osady 22 stanowią resztki potraw, przyrządzonych w naczyniu mieszającym 3, które przylegają do ściany wewnętrznej 4. Standardowo resztki potraw mogą kleić się do ściany wewnętrznej lub być na niej przypalone. Możliwe są różne rodzaje osadów 22, na przykład resztki potraw, takich jak mleko, śmietana, mąka i woda, czekolada, masło orzechowe, cukier, kawa, olej, budyń, barwnik spożywczy, sos pomidorowy lub tym podobne. Osady 22 mogą tworzyć zamkniętą warstwę na ścianie wewnętrznej 4 lub, jak pokazano, składać się z pojedynczych fragmentów.
Z kolei Fig.3 przedstawia naczynie mieszające 3 z urządzeniem czyszczącym 1, które połączone jest z mieszadłem 5. Mieszadło 5 zawiera tu na przykład wkład 8 spieniacza mleka, stosowany zazwyczaj do spieniania mleka, który znany jest również jako tak zwany wkład typu butterfly. Ponadto mieszadło 5 zawiera zespół 6 noży, na którym umieszczony jest wkład 8 spieniacza mleka. Urządzenie czyszczące 1 zawiera wiele, tu cztery, elementy czyszczące 9, które z kolei zawierają wiele umieszczonych obok siebie szczotek 10. Dwa elementy czyszczące 9 są umieszczone na wkładzie 8 spieniacza mleka, przebiegając promieniowo na zewnątrz względem osi 12 obrotu, podczas gdy dwa kolejne elementy czyszczące 9 w przypadku standardowego położenia wkładu 8 spieniacza mleka wewnątrz naczynia mieszającego 3 umieszczone są pod wkładem 8 spieniacza mleka, co sprawia, że szczotki 10 przebiegają w kierunku dna 10 naczynia. Urządzenie czyszczące 1 można zamocować do wkładu 8 spieniacza mleka na przykład za pomocą połączenia zapadkowego, połącznia wtykowego lub tym podobnych. Możliwe jest również umieszczenie urządzenia czyszczącego 1 na wkładzie 8 spieniacza mleka jako jednej części lub każdego elementu czyszczącego 9 urządzenia czyszczącego 1 oddzielnie, przy czym pierwszy wymieniony wariant jest bardziej wygodny ze względu mniejszą ilość czynności. Szczotkami 10 urządzenia czyszczącego 1 są na przykład szczotki stalowymi, które stykają się ze ścianą wewnętrzną 4 naczynia mieszającego 3 w stanie zmontowanym wkładu 8 spieniacza mleka i urządzenia czyszczącego 1 przynajmniej jednym obszarem końcowym. Dzięki temu, że urządzenie czyszczące 1 jest połączone z mieszadłem 5 urządzenia kuchennego 2 elementy czyszczące 9 urządzenia czyszczącego 1 poruszają się również automatycznie podczas obrotu mieszadła 5 za pomocą napędu obrotowego urządzenia kuchennego 2, przy czym szczotki 10 szorują po ścianie wewnętrznej 4 naczynia mieszającego 3 i wskutek mechanicznego współdziałania z osadem 22, znajdującym się na ścianie wewnętrznej 4, powodują oderwanie osadu 22.
W kolejnym wariancie wykonania wynalazku, Fig.5, urządzenie czyszczące 1 wykonane jest podobnie jak przekładnia planetarna. Urządzenie czyszczące 1 jest umieszczone na mieszadle 5, tu na zespole 6 noży, przy czym urządzenie czyszczące 1 zawiera cztery talerzowe elementy czyszcząc 9, które wchodzą w odcinki 11 części okręgu, wykonane pomiędzy nożami 7 zespołu 6 noży. Urządzenie czyszczące 1 zawiera zasadniczo obrotowo symetryczną podstawę, umieszczoną na mieszadle 5, tzn. również na osi 12 obrotu, na której usytuowane są cztery ramiona czyszczące, które przenoszą cztery talerzowe elementy czyszczące. Elementy czyszczące 9 są umieszczone zawsze wokół osi obrotu 13 obrotowo na ramionach czyszczących. Osie 13 obrotu elementów czyszczących, działających jako koła planetarne, przebiegają równolegle do osi 12 obrotu mieszadła 5. W kierunku promieniowym talerzowe elementy czyszczące 9 są aktywnie połączone ze ścianą wewnętrzną 4 naczynia mieszającego 3 w taki sposób, że elementy czyszczące 9 podczas obrotu mieszadła 5 toczą się po ścianie wewnętrznej 4 i obracają się przy tym zarówno wokół osi 12 obrotu, jak również wokół osi obrotu 13. Elementy czyszczące 9 mogą z kolei zawierać szczotki 10 (nie pokazano), które stykają się z dnem 20 naczynia. Ale talerzowe elementy czyszczące 9 mogą również oddziaływać bezpośrednio na dno 20 naczynia, podobnie jak tarcza szlifierska. W zależności od wielkości elementów czyszczących 9 i odcinków 11 częściowych okręgu, znajdujących się pomiędzy nożami 7, elementy czyszczące 9 podczas obrotu wokół osi obrotu 13 mogą równocześnie oddziaływać mechanicznie na noże 7 i uwalniać je ewentualnie od osadu 22.
EP1731068 Mikser do gotowania, przetwarzania i przygotowywania żywności, Electrodomesticos Taurus S.L. Trench Roca Lluis et al. Data patent: 3.10.2007. Przedmiotowy wynalazek dotyczy miksera do gotowania, przetwarzania i przygotowywania żywności, zawierającego układ napędowy do obracania łopatek wewnątrz pojemnika zawierającego żywność przeznaczoną do przetwarzania, układ przenoszący energię cieplną do ogrzewania żywności w tym pojemniku, a także układ ważenia do określania wagi żywności wewnątrz pojemnika.

Fig.1 stanowi ogólny rzut boczny miksera do gotowania żywności, według wynalazku w pierwszym przykładzie realizacji; Fig.2 stanowi schematyczny rzut boczny przekroju poprzecznego, ilustruj-ący instalację układu napędowego oraz układu przenoszącego energię cieplną w mikserze do gotowania żywności, według Fig.1; Fig.3 stanowi widok perspektywiczny od spodu miksera do gotowania żywności według Fig.1, bez konstrukcji podstawy i bez obudowy, celem lepszego pokazania głównych elementów składowych;
Fig.4 stanowi schematyczny rzut boczny przekroju poprzecznego, ilustrujący instalację układu napędowego oraz układu przenoszącego energię cieplną w mikserze do gotowania żywności, według drugiego przykładu realizacji przedmiotowego wynalazku; Fig.5 stanowi schematyczny rzut boczny przekroju poprzecznego, ilustrujący instalację układu napędowego oraz układu przenoszącego energię cieplną w mikserze do gotowania żywności, według trzeciego przykładu realizacji przedmiotowego wynalazku; Fig.6 stanowi schematyczny rzut boczny przekroju poprzecznego, ilustrujący instalację układu napędowego oraz układu przenoszącego energię cieplną w mikserze do gotowania żywności, według czwartego przykładu realizacji przedmiotowego wynalazku; Fig.7 stanowi widok perspektywiczny rozłożony, przedstawiający pojemnik, mieszadła lub łopatki oraz część podstawy zawierającą mechanizm do chwytania lub zwalniania obrotowego trzpienia mieszadła lub łopatki, nadający się do zastosowania w dowolnym z poprzednich przykładów realizacji; Fig.8 stanowi widok perspektywiczny od dołu pojemnika z trzpieniem mieszadła lub łopatki w położeniu roboczym, przy czym wymieniona część podstawy jest sprzęgnięta z pojemnikiem; Fig.9 stanowi widok perspektywiczny od dołu pojemnika, z częścią podstawy przytrzymującą trzpień mieszadła lub łopatki; Fig.10 stanowi widok perspektywiczny pojemnika z uchwytem pojemnika częściowo odłączonym, a także czujników, które nie stanowią części pojemnika, ale są złączone ze wspornikiem (nie zilustrowano na tej figurze rysunku); Fig.11 stanowi widok perspektywiczny rozłożony uchwytu pojemnika, a także część pokrywy; Fig.12 stanowi widok perspektywiczny rozłożony tych samych elementów składowych, które są zilustrowane na Fig.11, lecz od przeciwnej strony; Fig.13 stanowi widok główny z góry miksera do gotowania żywności z Fig.1, ze zdjętą pokrywą pojemnika i z koszykiem zamocowanym wewnątrz pojemnika; Fig.14 stanowi widok perspektywiczny koszyka z Fig.13 i dodatkowego uchwytu, który może być do niego dołączany; Fig.15 stanowi widok perspektywiczny uchwytu sprzęgniętego z koszykiem; Fig.16 stanowi widok boczny uchwytu usytuowanego w pozycji umożliwiającej sprzęgnięcie z końcówką szpatułki; Fig.17 stanowi widok boczny uchwytu sprzęgniętego z wymienioną końcówką szpatułki, tworząc narzędzie do zgarniania; Fig.18 stanowi widok perspektywiczny górnego korytka, dodatkowego elementu do gotowanie na parze, zamocowanego na pojemniku zamiast pokrywy; Fig.19 stanowi widok perspektywiczny rozłożony górnego korytka według Fig.18, zawierającego dodatkową tacę do gotowania na parze.
Nawiązując do Fig.1,2,3, mikser kuchenny do gotowania, przetwarzania i przygotowywania żywności, według przykładu realizacji przedmiotowego wynalazku, zawiera konstrukcję podstawy 48, na której jest zamontowany wspornik 49 do podtrzymywania pojemnika 2 na żywność, która ma być przetwarzana lub przygotowywana. Urządzenie to zawiera układ napędowy do obracania elementów mieszających lub tnących, takich jak mieszadła lub łopatki 10, które są zainstalowane w taki sposób, aby mogły obracać się wokół trzpienia obrotowego 50 wewnątrz pojemnika 2. Wymieniony trzpień obrotowy 50 jest związany z pojemnikiem 2 i ma jeden koniec połączony z pierwszym elementem sprzęgła 51 wystającym w dół przez otwór 12 uformowany w, mającym kształt kopuły, dnie 61 pojemnika 2. Pojemnik 2 zawiera część 62 podstawy, sprzęgniętą zewnętrznie, w sposób umożliwiający rozłączanie, z wymienionym, mającym kształt kopuły, dnie 61, przy czym wymieniona część 62 podstawy służy do wyśrodkowania pojemnika 2 względem wspornika 49. Ta część 62 podstawy zawiera mechanizm do przytrzymywania lub zwalniania trzpienia obrotowego 50, w celu oddzielania mieszadeł lub łopatek 10 od pojemnika 2, co zostanie bardziej szczegółowo objaśnione poniżej.
W przykładzie realizacji zilustrowanym na Fig. 1, 2 oraz 3, układ napędowy zawiera silnik elektryczny 33, napędzające koło pasowe 32 zamocowane do wału zdawczego wymienionego silnika 33, napędzane koło pasowe 28, połączone z wałem napędowym 36 oraz pas 35 łączący wymienione napędzające koło pasowe 32 z wymienionym napędzanym kołem pasowym 28. Wał napędowy 36 jest połączony z drugim elementem sprzęgła 52, usytuowanym w odpowiednim położeniu do sprzęgania z wymienionym pierwszym elementem sprzęgła 51 wymienionego trzpienia obrotowego 50 mieszadeł lub łopatek 10, gdy pojemnik 2 pozostaje na wsporniku 49. W praktyce, gdy pojemnik 2 zostaje umieszczony nad wspornikiem 49, pierwszy i drugi element sprzęgła 51, 52 automatycznie sprzęgają się, a gdy pojemnik 2 zostaje zdjęty ze wspornika 49, pierwszy i drugi element sprzęgła 51, 52 automatycznie rozprzęgają się.
Obudowę 1 montuje się nad wymienioną konstrukcją 48 podstawy, wymieniona obudowa 1 ma otwór zwrócony do wymienionego wspornika 49, poprzez który pojemnik 1 może zostać osadzany na wsporniku 49 lub z niego zdejmowany. Obudowa 1 ma również wydzielone miejsce, w którym mieści się część układu napędowego, oraz jedną lub więcej płytek obwodów drukowanych 7 (Fig.3), które stanowią elektroniczny obwód zasilania i sterowania zaopatrzony w co najmniej jeden elektroniczny mikroprocesor. W jednym z korzystnych przykładów realizacji wynalazku, wymieniony elektroniczny obwód zasilania i sterowania zawiera dwa mikroprocesory, jeden do sterowania indukcyjnym układem grzania, opisanym poniżej, a drugi do sterowania pozostałymi funkcjami urządzenia. Elektroniczny obwód zasilania i sterowania jest dołączony do dostępnych od zewnątrz gałek sterowników 5, które stanowią część elementów wyboru operacji, skojarzonych z wyświetlaczem 8 mającym, na przykład, postać wyświetlacza ciekłokrystalicznego LCD. Pojemnik 2 jest zaopatrzony w uchwyt 4 oraz ma część ferromagnetyczną 22 w postaci zewnętrznej warstwy ferromagnetycznej stali nierdzewnej 22, usytuowanej na dolnej, zasadniczo cylindrycznej części pojemnika 2. Korzystnie, rozpraszająca ciepło warstwa stopu glinu 21 jest usytuowana pomiędzy pojemnikiem 2, a zewnętrzną warstwą ferromagnetyczną stali nierdzewnej 22. Pojemnik 2 jest zamknięty pokrywą 3 zaopatrzoną w odpowiednią gałkę 27. Ta gałka 27 może być usuwana, aby zapewnić otwór dla obsługi. Mikser do gotowania żywności zawiera układ przenoszenia energii cieplnej oparty na urządzeniu grzejnika indukcyjnego 6 zamontowanego na konstrukcji 48 podstawy w taki sposób, że otacza on wspomnianą część ferromagnetyczną 22 pojemnika 2, gdy pojemnik 2 jest zamocowany na wsporniku 49. Wymienione urządzenie grzejnika indukcyjnego 6 zawiera cewkę wytwarzającą pole elektromagnetyczne, która jest oddzielona od wspornika 49 i usytuowanym w uprzednio określonej odległości, na przykład 0,5 do 6 cm, od wymienionej części ferromagnetycznej 22 pojemnika 2. Korzystnie, wspornik 49 ma kształt zasadniczo cylindrycznego dzbanka, dostosowanego do przyjmowania części ferromagnetycznej 22 pojemnika 2 w taki sposób, że ścianka boczna wspornika 49 jest umieszczona pomiędzy częścią ferromagnetyczną 22 pojemnika 2, a urządzeniem grzejnika indukcyjnego 6. Opcjonalnie, mikser do gotowania żywności może zawierać układ chłodzący, do schładzania pojemnika 2.
Mikser do gotowania żywności zawiera również układ do ważenia zawartości pojemnika 2, podczas gdy ten pojemnik 2 jest zamocowany na wsporniku 49. Ten układ ważenia zawiera, co najmniej jeden, przetwornik obciążenia 34, zamontowany na konstrukcji 48 podstawy, przy czym wymieniony przetwornik obciążenia 34 przytrzymuje wspornik 49. Wymieniony przetwornik obciążenia 34 zawiera, na przykład, tensometryczny przyrząd pomiarowy skojarzony z trwałym korpusem zamocowanym jednym końcem do konstrukcji 48 podstawy a drugim końcem do wymienionego wspornika 49. Ponieważ urządzenie grzejnika indukcyjnego 6 jest oddzielone od wspornika 49, ciężar urządzenia grzejnika indukcyjnego 6 jest wyłączony z ważenia przeprowadzanego przez układ ważenia, to jest przez wymieniony przetwornik obciążenia 34.
Częstotliwość robocza urządzenia grzejnika indukcyjnego 6, korzystnie, mieści się między 10 a 40 kHz, a elektroniczny obwód zasilania i sterowania steruje mocą grzewczą przez systemu przerywania sygnału. W przeciwieństwie do innych mikserów do gotowania żywności, co oznacza w praktyce , że energia dostarczana do urządzenia grzejnika indukcyjnego 6 jest stała, a temperaturę reguluje się przez przerywanie sygnału, to jest impulsowo. Mikser posiada również układy zabezpieczające w przypadku niezamierzonego lub nieodpowiedniego otwarcia pokrywy 3 pojemnika 2, które uniemożliwiają działanie układów napędowych i/lub układów przenoszących energię cieplną, jeżeli wymieniona pokrywa 3 nie zostanie prawidłowo zamocowana przy zamykaniu pojemnika 2 w uprzednio określony sposób. Na Fig.10 zilustrowan o pojemnik 2 z oddzielonym od niego uchwytem 4. W sąsiedztwie pierścieniowego ekranu 45 pojemnika 2 są pokazane czujniki Halla 16, które w rzeczywistości montuje się na ściance bocznej wspornika 49, i które w stosunku do pojemnika 2 przyjmują położenie zilustrowane na Fig.10, gdy pojemnik 2 jest podtrzymywany na wsporniku 49.
W charakterze układu zabezpieczenia wykorzystuje się dwa pręty magnetyczne 15 oraz dwa odpowiadające im czujniki Halla 16, które stanowią rezerwowy środek bezpieczeństwa, ponieważ pojedynczy pręt magnetyczny oraz pojedynczy czujnik Halla byłyby wystarczający. Elektroniczny układ zasilania i sterowania miksera zawiera pamięć, w której przechowuje się, na przykład, różne programy gotowania, które mogą być wybierane za pośrednictwem sterowników 5 układów wyboru operacji. Wyświetlacz 8, usytuowany na obudowie 1, może wskazywać, na przykład, listę przechowywanych programów, oraz wskazania ułatwiające korzystanie z programów lub urządzenia, wybrany program lub fazę wykonania aktualnie realizowanego programu. Podobnie, sterowniki 5 umożliwiają programowanie czasów, temperatur oraz prędkości obrotów mieszadeł lub łopatek 10, niezależnie od przechowywanych programów, lub też projektowanie i zapisywanie programów. Wymieniona pamięć może być pamięcią wewnętrzną lub pamięcią zintegrowaną z wyjmowanym, wymienialnym modułem. W kolejnym przykładzie realizacji wynalazku elektroniczny układ zasilania i sterowania zawiera moduł łączności dostosowany do łączenia z komputerem lub siecią, celem lokalizowania i ładowania odebranych programów cyfrowych przepisów, które mogą być wykonywane przez elektroniczny układ zasilania i sterowania. W podobny sposób, programy przechowywane w pamięci elektronicznego układu zasilania i sterowania mogą być ładowane do komputera lub sieci za pośrednictwem modułu łączności.
WNIOSKI
Historia Termomixa jest prozaiczna, ponieważ przedstawia drogę rozwoju od miksera na początku lat 60-tych do wielofunkcyjnego robota kuchennego, który w wyniku ewolucji połączył funkcje miksowania i gotowania gotowych potraw. Na swojej ponad 50 letniej ścieżce rozwoju był cały czas unowocześniany technicznie, dzięki czemu powstały modele TM21, TM31, TM5 oraz ostatni TM6, który obecnie łączy w jednym urządzeniu 12 funkcji. Przykładowo: miksowanie, gotowania, mielenie mięsa, wyrabianie ciasta, lodów itp. Ponieważ dzisiaj Termomix jest szczytem luksusu, który pojawił się w polskich kuchniach w latach XXI- wieku i nobilituje gospodynie w dyskusjach kuchennych, ciekawe wydaje się porównanie w/w urządzenia z konkurencją. Obecnie dostępne są podobne urządzenia w sieci Lidl pod nazwą Monsieur Cuisine Connect, a w sieci Biedronka pod nazwą Hoffen Chef Express z funkcją WIFI. Producenci obu urządzeń są no-name więc trudno się wypowiedzieć o prawdziwej orginalności technicznej obu rozwiązań. Jedno co jest pewne, to pochodzenie obu rządzeń, które definitywnie wskazuje na kierunek Made in China. Natomiast brak reakcji Termomixa, który posiada około setki patentów z tej dziedziny, może tylko świadczyć o lekceważeniu chińskich kopii swoich wyrobów kuchennych, z względu na wygaśniecie pierwszych praw patentowych oraz jakość swoich wyrobów i szerokiej dostępność serwisu w krajach Unii.
Na polskim podwórku swoich sił próbował Zelmer, który posiadał również oryginalne, opatentowane, rozwiązania robotów ale zabrakło gospodarza i wiary w wizje rozwoju firmy. Firma Zelmer została pogrzebana po zmianie właściciela jakim została firma BSH Hausgeräte GmbH, która doprowadziła do praktyczne likwidacji polskiej marki AGD. 1 stycznia 2020 r. marka Zelmer zostaje sprzedana hiszpańskiej grupie B&B Trends, która zatrudnia 250 pracowników i swoje produkty sprzedaje w ponad 50 krajach pod różnymi markami. Smutne ale prawdziwe tym bardziej, że do chwili obecnej żona używa miksera Zelmera, jako podstawowe urządzenie w naszej kuchni.
Uwaga: Ponieważ ostatni patent Pl/EP1731068 został opracowany niestarannie – brak oznaczeń cyfrowych na załączonych rysunkach, proponuje dociekliwym czytelnikom skorzystanie z oryginalnego patentu EP1731068B1 w celu korelacji treści polskiego opisu z zamieszczonymi numerami części składowych urządzenia.
Krótki film ilustrujący działanie najnowszej wersji Termomixa dostępny jest w Youtube: TM6 podstawy obsługa – https://www.youtube.com/watch?v=kW2TrOBaHu0
Porównanie Thermomix vs. LIDLomix Monsieur Cuisine Connect vol. 2 zawiera krótki film: https://youtu.be/jvlENZluWAw
Dla miłośników militariów polecam gorąco pozycje książkową „Kotły i menażki żołnierskie smaki dawniej i dziś” dostepną w Internecie https://wceo.wp.mil.pl/y/pliki/rozne/2019/11/Kotly_i_menazki.pdf
 Wydanej przez Wojskowe Centrum Edukacji Obywatelskiej, Warszawa 2019
Wydanej przez Wojskowe Centrum Edukacji Obywatelskiej, Warszawa 2019
